问答:
什么是GPIO ?
General-purpose input/output通用型之输入输出的简称
IRQ
IRQ (Interrupt ReQuest) 指来自设备的中断请求。
RCC的功能
RCC (Reset and Clock Control) 是嵌入式系统中负责管理系统时钟和复位功能的重要模块。让我详细解释一下:
- RCC的主要功能:
- 系统时钟配置和管理
- 外设时钟的使能和失能
- 时钟源的选择(内部/外部时钟)
- 时钟频率的分频和倍频
- 系统复位控制
- 主要时钟源类型:
- HSI (High Speed Internal) - 内部高速时钟
- HSE (High Speed External) - 外部高速时钟
- LSI (Low Speed Internal) - 内部低速时钟
- LSE (Low Speed External) - 外部低速时钟
- PLL (Phase-Locked Loop) - 锁相环
- RCC在实际开发中的应用:
// 以STM32为例,开启GPIOA时钟的代码
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置系统时钟的示例
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
// 配置振荡器
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
// ... 其他配置
HAL_RCC_OscConfig(&RCC_OscInitStruct);
// 配置时钟树
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
// ... 其他配置
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2);
}
- RCC配置的重要性:
- 影响系统性能和功耗
- 决定外设工作频率
- 确保系统稳定运行
- 为低功耗模式切换提供支持
- 使用RCC时的注意事项:
- 配置时序要按照数据手册要求
- 注意时钟树的依赖关系
- 考虑系统供电和功耗需求
- 确保外设时钟频率在允许范围内
- 正确处理时钟切换过程中的稳定等待
理解和正确使用RCC对于嵌入式系统的开发至关重要,它直接影响着系统的性能、稳定性和功耗。不同的芯片厂商可能对RCC的具体实现有所不同,但基本概念和功能是类似的。
STM的固件库在哪里下载
https://bbs.21ic.com/icview-3349496-1-1.html
Step1. 安装keli
方法,直接在网上搜索就可以,也可以看网易课堂提到的网盘链接 https://study.163.com/course/courseLearn.htm?courseId=1006447055#/learn/video?lessonId=1054086739&courseId=1006447055
Step2. 安装芯片组
https://www.keil.arm.com/devices/ 可以到keil的官网进行下载,我下载的是然后找到 F103 对应的芯片组软件
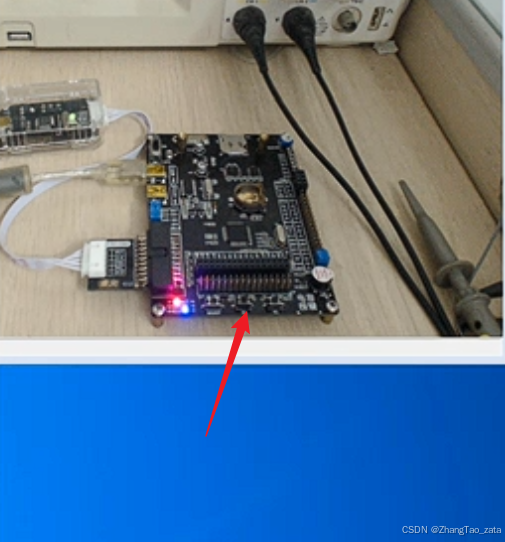
Step3. 使用DAP仿真器下载程序
像这样连接线材,连接DAP的USB-A口插到电脑上, 另一个连到板子上的接电源。

使用keil打开测试固件的程序
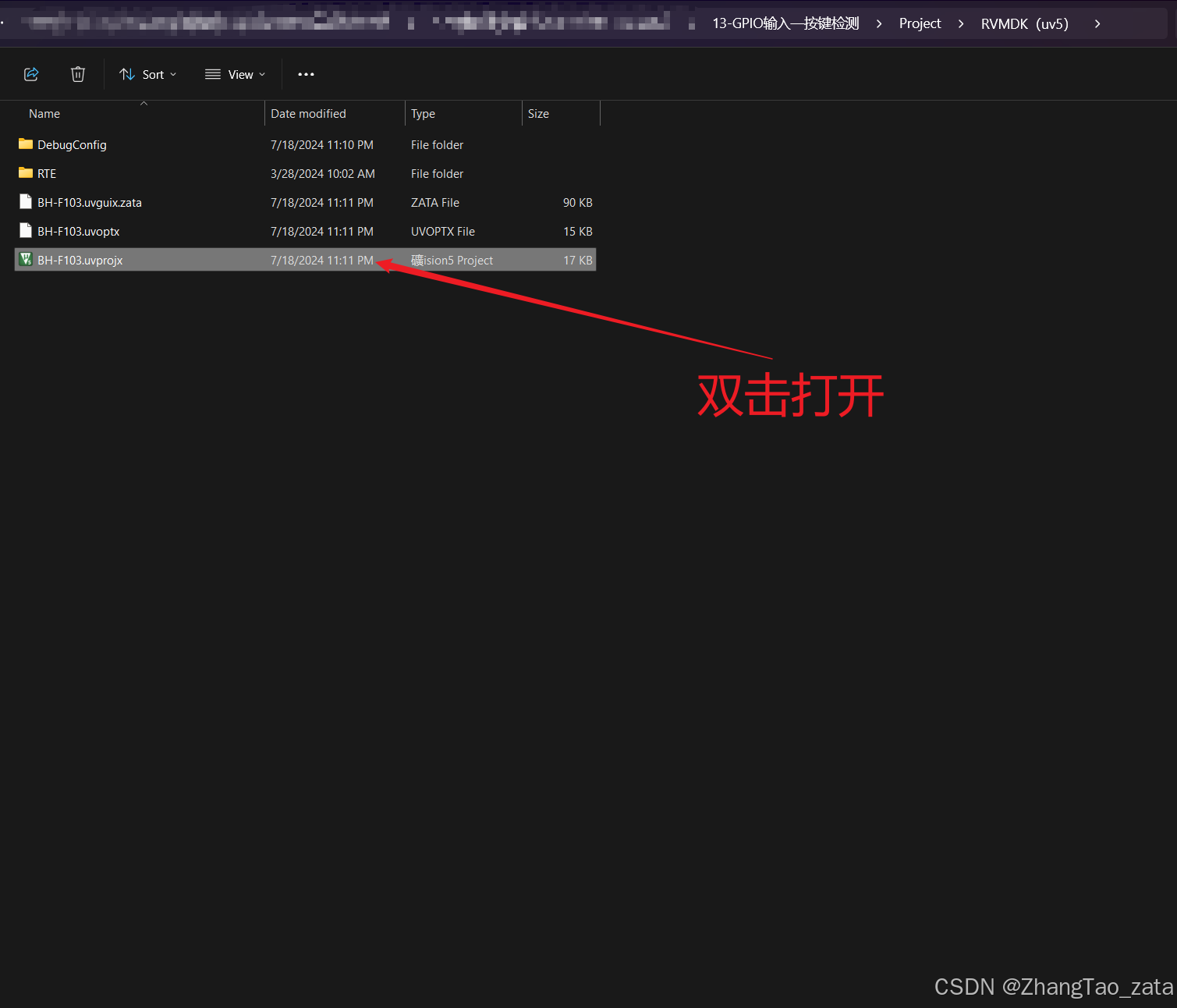
下载程序到开发板,一会进度条加载完就下载好了
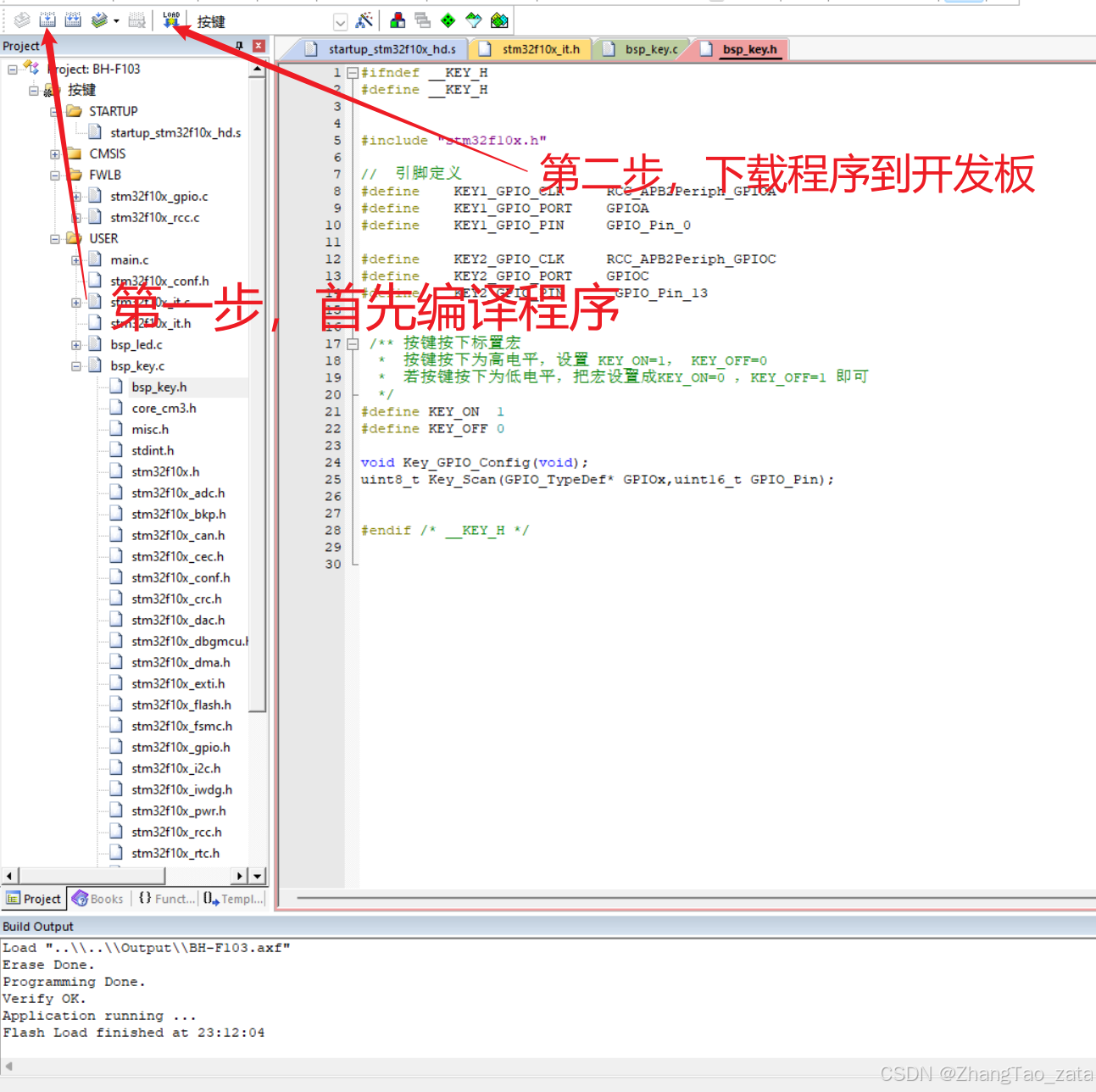
点击下图的第二个按钮就可以切换灯了
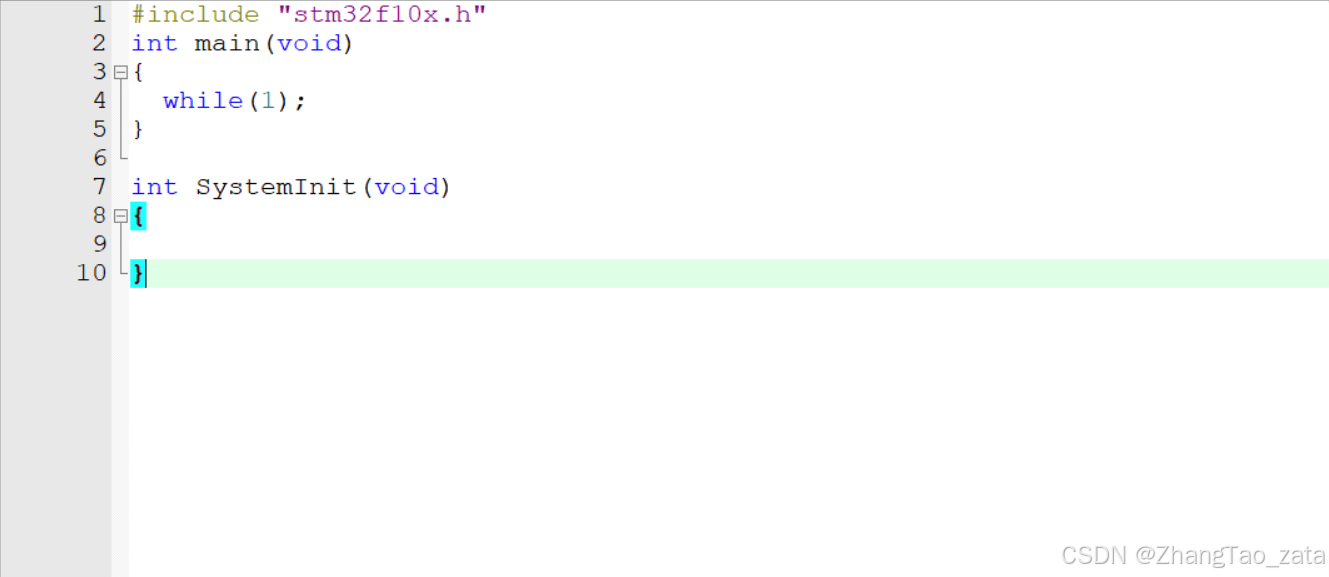
7-(第一节) 新建工程模板-寄存器版
- 新建项目-并选择芯片
- 导入启动文件 XX.s
- 创建main.c文件
- 创建stm32f10x.h 固件库
5.连接DAP设置
 图1 图1 |  图2 图2 |
 图3 图3 |  图4 图4 |
 图5 图5 |  图6 图6 |
7-(第二节)使用寄存器点亮LED
本节课代码如下,为什么和老师代码不一样?因为我觉得老师教错了,在CRL这里
#include "stm32f10x.h"
int main(void)
{
// RCC
*(unsigned int *)0X40021018 |= (1<<4);
//ODR
*(unsigned int *)0X4001100C &= ~(1<<2);
//CRL
*(unsigned int *)0X40011000 |= (1<<8);
*(unsigned int *)0X40011000 &= ~(1<<10); //这里我和老师不一样,不过效果是一样的,后续代码我就按照老师的来了
}
int SystemInit(void)
{
}
找到寄存器的地址 (寄存器的GPIO的起始地址 + 偏移地址),因为是MINI开发板子上的端口PC2对应的是C,所以找CPIOC
配置ODR寄存器,其中可以用ODR中的第四位控制灯泡,具体咱回事我没太弄懂
CRL寄存器,这个是控制输入还是输出,以及用什么模式的,设置为“推挽输出”,又因为第一步对应PC2,对应的是‘2’
打开时钟CRC寄存器(APB2外设时钟使能寄存器:为什么是APB2,因为GPIO在APB2总线上),如果要读取外设就必须要打开。
(unsigned int *)0X4001100C是什么意思?
这是将内存地址 0X4001100C 转换为指向 unsigned int 类型的指针。 指针类型是为了:
告诉编译器如何解释内存中的数据。比如 unsigned int* 指针解引用时,会把那个地址的4个字节当作无符号整数来读取
指针运算时确定步长。unsigned int* 加1会前进4个字节,而 char* 加1只前进1个字节
- 为什么指针也有类型?
指针类型是为了:
告诉编译器如何解释内存中的数据。比如 unsigned int* 指针解引用时,会把那个地址的4个字节当作无符号整数来读取 指针运算时确定步长。unsigned int* 加1会前进4个字节,而 char* 加1只前进1个字节 一般我们这样定义
unsigned int* p1 = (unsigned int*)0x1000;
p1 + 1; // 0x1004
char* p2 = (char*)0x1000;
p2 + 1; // 0x1001
- *(unsigned int *)0X4001100C什么意思?
*(unsigned int *)0X4001100C对内存地址 0X4001100C 进行解引用(*),获取该地址存储的无符号整数值。
举例:
// 读取该地址的值
unsigned int value = *(unsigned int *)0X4001100C;
// 写入值到该地址
*(unsigned int *)0X4001100C = 0x1;
这种操作常用于直接读写硬件寄存器。
- 为什么要这么麻烦,直接*0X4001100C行不行
不行,因为 0X4001100C 是一个数值常量,直接用*解引用会出错。需要先把它转换成指针类型((unsigned int *)),才能进行解引用操作。
这是C语言的语法规则要求 - 解引用操作必须作用于指针类型。
- *(unsigned int *)0X4001100C &= ~(1«2) 的含义:
0X4001100C 是内存地址,要加(unsigned int *)转成指针才能解引用 1«2 产生二进制…0100 ~ 取反得到…1011 &= 进行AND操作,会把对应地址值的第2位清零,因为0和任何值做AND都得0 其他位保持不变,因为1和原值做AND保持原值
- &= ~ 和 |= 的作用
正如第五问所问: &= ~ 用来清零 |= 用来写1
当然操作过程要用到位运算 (1<<XXX)
- 这节课的视频里面,老师为什么说4位为一组?
STM32寄存器中4位一组是因为:
- 每4位可以表示一个16进制数(0-F)
- 容易读写和分组管理
- 符合很多外设配置的需求(如GPIO的4位可以配置一个引脚的模式)
例如一个32位寄存器可以分为8组,每组4位,方便配置和管理不同功能。 那么很显然,如果你在C语言里面用2进制表示的话,实际上也是可以的,不过就是麻烦点
8-使用寄存器点亮LED
第8课包含两节: 第一节说功能框图(具体内容可以看STM32F10X-中文参考这本电子书) 第二节把第7课中的地址通过定义一个常量做映射
没有什么太有争议或者难以理解的内容
9-1自己写库(第一节)-GPIO寄存器结构体定义
代码如下
//stm32f10x.h
#define PERIPH_BASE ((unsigned int)0x40000000)
#define APB1PERIPH_BASE PERIPH_BASE
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
#define AHBPERIPH_BASE (PERIPH_BASE + 0x20000)
#define RCC_BASE (AHBPERIPH_BASE + 0x1000)
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
#define RCC_APB2ENR *(unsigned int*)(RCC_BASE + 0x18)
typedef unsigned int uint32_t;
typedef unsigned short uint16_t;
typedef struct
{
uint32_t CRL;
uint32_t CRH;
uint32_t IDR;
uint32_t ODR;
uint32_t BSRR;
uint32_t BRR;
uint32_t LCKR;
}GPIO_TypeDef;
#define GPIOC ((GPIO_TypeDef*)GPIOC_BASE)
这是定义了一个名为GPIO_TypeDef的结构体,用于映射GPIO外设的寄存器布局:
```c
typedef struct {
uint32_t CRL; // 端口配置低寄存器 (0x00)
uint32_t CRH; // 端口配置高寄存器 (0x04)
uint32_t IDR; // 端口输入数据寄存器 (0x08)
uint32_t ODR; // 端口输出数据寄存器 (0x0C)
uint32_t BSRR; // 端口位设置/清除寄存器 (0x10)
uint32_t BRR; // 端口位清除寄存器 (0x14)
uint32_t LCKR; // 端口配置锁定寄存器 (0x18)
} GPIO_TypeDef;
```
结构体成员的排列顺序与寄存器在内存中的实际布局一致。这样通过结构体指针就可以直接访问这些寄存器
这基于C语言结构体在内存中的存储原理:
连续性:结构体成员在内存中按声明顺序连续存储
对齐:每个成员按其类型的对齐要求存储。这里uint32_t通常4字节对齐,刚好对应寄存器间隔:
CRL - 0x00 CRH - 0x04 IDR - 0x08 ODR - 0x0C指针访问:当把GPIOC_BASE转为GPIO_TypeDef指针时,编译器会根据结构体布局自动计算每个成员的偏移量,从而访问到对应寄存器
这样就实现了通过结构体直接操作物理寄存器。
GPIO_TypeDef* GPIOC = (GPIO_TypeDef*)GPIOC_BASE; GPIOC->ODR = ...; // 访问ODR寄存器
//main,c
#include "stm32f10x.h"
int main (void)
{
// 打开时钟
RCC_APB2ENR |= ( (1) << 4 );
// 配置IO口为输出
GPIOC->CRL |= ( (1) << (4*2) );
// 控制ODR寄存器
GPIOC->ODR &= ~(1<<2);
//GPIOC->ODR |= (1<<2);
}
void SystemInit(void)
{
//函数体为空为了骗过编译器
}
9-2编写GPIO端口置位复位函数
先贴代码:
main.c
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
void soft_delay( unsigned int count)
{
for(;count !=0 ;count--);
}
int main (void)
{
// 打开 GPIOC 端口的时钟
RCC->APB2ENR |= ( (1) << 4 );
// 配置IO口为输出
//GPIOC->CRL &= ~( (10000) << (4*2) );
GPIOC->CRL |= ( (1) << (4*2) );
// 配置ODR寄存器
//GPIOC->ODR &= ~(1<<2);
GPIO_SetBits(GPIOC,(1<<2));
while(1)
{
//GPIOC->ODR |= (1<<2);
GPIO_ResetBits(GPIOC,(1<<2));
soft_delay(1000000); // 这里用10进制表示的
//GPIOC->ODR &= ~(1<<2);
GPIO_SetBits(GPIOC,(1<<2));
soft_delay(1000000);
}
}
void SystemInit(void)
{
// 函数体为空,目的是为了骗过编译器不报错
}
stm32f10x.h
#ifndef __STM32F10X_H
#define __STM32F10X_H
#define PERIPH_BASE ((unsigned int)0x40000000)
#define APB1PERIPH_BASE PERIPH_BASE
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
#define AHBPERIPH_BASE (PERIPH_BASE + 0x20000)
#define RCC_BASE (AHBPERIPH_BASE + 0x1000)
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
#define RCC_APB2ENR *(unsigned int*)(RCC_BASE + 0x18)
typedef unsigned int uint32_t;
typedef unsigned short uint16_t;
typedef struct
{
uint32_t CRL;
uint32_t CRH;
uint32_t IDR;
uint32_t ODR;
uint32_t BSRR;
uint32_t BRR;
uint32_t LCKR;
}GPIO_TypeDef;
typedef struct
{
uint32_t CR;
uint32_t CFGR;
uint32_t CIR;
uint32_t APB2RSTR;
uint32_t APB1RSTR;
uint32_t AHBENR;
uint32_t APB2ENR;
uint32_t APB1ENR;
uint32_t BDCR;
uint32_t CSR;
}RCC_TypeDef;
#define GPIOC ((GPIO_TypeDef*)GPIOC_BASE)
#define RCC ((RCC_TypeDef*)RCC_BASE)
#endif /* __STM32F10X_H */
stm32f10x_gpio.h
#ifndef __STM32F10X_GPIO_H
#define __STM32F10X_GPIO_H
#include "stm32f10x.h"
void GPIO_SetBits(GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin);
void GPIO_ResetBits( GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin );
#endif /* __STM32F10X_GPIO_H */
stm32f10x_gpio.c
#include "stm32f10x_gpio.h"
/**
* 函数功能:设置引脚为高电平
* 参数说明:GPIOx: 该参数为 GPIO_TypeDef 类型的指针,指向 GPIO 端口的地址
* GPIO_Pin: 选择要设置的 GPIO 端口引脚,可输入宏 GPIO_Pin_0-15,
* 表示 GPIOx 端口的 0-15 号引脚。
*/
void GPIO_SetBits(GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin)
{
/* 设置 GPIOx 端口 BSRR 寄存器的第 GPIO_Pin 位,使其输出高电平 */
/* 因为 BSRR 寄存器写 0 不影响,宏 GPIO_Pin 只是对应位为 1,其它位均为 0,所以可以直接赋值 */
GPIOx->BSRR |= GPIO_Pin;
}
/**
* 函数功能:设置引脚为低电平
* 参数说明:GPIOx: 该参数为 GPIO_TypeDef 类型的指针,指向 GPIO 端口的地址
* GPIO_Pin: 选择要设置的 GPIO 端口引脚,可输入宏 GPIO_Pin_0-15,
* 表示 GPIOx 端口的 0-15 号引脚。
*/
void GPIO_ResetBits( GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin )
{
/* 设置 GPIOx 端口 BRR 寄存器的第 GPIO_Pin 位, 使其输出低电平 */
/* 因为 BRR 寄存器写 0 不影响,宏 GPIO_Pin 只是对应位为 1,其它位均为 0,所以可以直接赋值 */
GPIOx->BRR |= GPIO_Pin;
}
1. 为什么没有引入stm32f10x_gpio.c,也能正常调用其中的函数
这个问题涉及到C语言编译和链接的概念。让我来详细解释:
在这个项目中,虽然代码中没有直接
#include "stm32f10x_gpio.c",但程序仍然能够正常工作,原因是:
main.c引入了stm32f10x_gpio.h头文件,该头文件声明了GPIO_SetBits和GPIO_ResetBits这两个函数stm32f10x_gpio.c源文件包含了这两个函数的实际实现- 在项目编译时,编译器会分别编译
main.c和stm32f10x_gpio.c,然后链接器会将它们链接在一起实际上,直接引入
.c文件通常是不推荐的做法:
- 头文件(
.h)用于声明函数接口- 源文件(
.c)用于实现具体功能- 编译器会分别编译各个源文件,然后链接器将它们组合成最终的可执行文件
编译过程是这样的:
main.c ────┐ ├── 编译 --> 链接 --> 可执行文件 stm32f10x_gpio.c ─┘如果你直接
#include "stm32f10x_gpio.c",可能会导致:
- 函数重复定义错误(如果该.c文件在多个地方被引入)
- 编译时间增加
- 代码组织混乱
所以正确的做法就是你现在的方式:
- 在头文件中声明函数
- 在源文件中实现函数
- 在项目配置中将所有需要的源文件加入编译
这样可以保持代码的模块化和可维护性,同时避免潜在的编译错误。
2. 头文件防重
代码
#ifndef __STM32F10X_GPIO_H #define __STM32F10X_GPIO_H // 头文件内容 #endif这种方式称为"Include Guard"或"Header Guard" 防止头文件被重复包含导致的重复定义问题 有些编译器也支持 #pragma once,效果类似
3. 声明和定义的区别
// 声明 - 告诉编译器函数的存在 void func(int x);
// 定义 - 提供函数的具体实现 void func(int x) {}
4. 条件编译:
#ifdef DEBUG // 调试代码 #else // 发布代码 #endif #if defined(PLATFORM_A) // 平台A的代码 #elif defined(PLATFORM_B) // 平台B的代码 #endif
9-3 自己写库,构建库函数雏形
代码如下
以下是文件夹的结构和内容:
目录结构: 📄 main.c 📄 startup_stm32f10x_hd.s // 启动文件 📄 stm32f10x.h 📄 stm32f10x_gpio.c 📄 stm32f10x_gpio.h
文件 ‘main.c’:
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#define LED_G_GPIO_PORT GPIOC
#define LED_G_GPIO_CLK_ENABLE (RCC->APB2ENR |= ( (1) << 4 ))
#define LED_G_GPIO_PIN GPIO_Pin_2
void Delay(uint32_t count)
{
for( ; count !=0; count-- );
}
int main (void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 打开 GPIOC 端口的时钟
LED_G_GPIO_CLK_ENABLE;
GPIO_InitStructure.GPIO_Pin = LED_G_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(LED_G_GPIO_PORT, &GPIO_InitStructure);
while(1)
{
GPIO_SetBits(LED_G_GPIO_PORT,LED_G_GPIO_PIN);
Delay(0xFFFF);
GPIO_ResetBits(LED_G_GPIO_PORT,LED_G_GPIO_PIN);
Delay(0xFFFF);
}
}
void SystemInit(void)
{
// 函数体为空,目的是为了骗过编译器不报错
}
文件 ‘stm32f10x.h’:
#ifndef __STM32F10X_H
#define __STM32F10X_H
// 用来存放STM32寄存器映射的代码
// 外设 perirhral
#define PERIPH_BASE ((unsigned int)0x40000000)
#define APB1PERIPH_BASE PERIPH_BASE
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
#define AHBPERIPH_BASE (PERIPH_BASE + 0x20000)
#define RCC_BASE (AHBPERIPH_BASE + 0x1000)
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
#define RCC_APB2ENR *(unsigned int*)(RCC_BASE + 0x18)
#define GPIOC_CRL *(unsigned int*)(GPIOC_BASE + 0x00)
#define GPIOC_CRH *(unsigned int*)(GPIOC_BASE + 0x04)
#define GPIOC_IDR *(unsigned int*)(GPIOC_BASE + 0x08)
#define GPIOC_ODR *(unsigned int*)(GPIOC_BASE + 0x0C)
#define GPIOC_BSRR *(unsigned int*)(GPIOC_BASE + 0x10)
#define GPIOC_BRR *(unsigned int*)(GPIOC_BASE + 0x14)
#define GPIOC_LCKR *(unsigned int*)(GPIOC_BASE + 0x18)
typedef unsigned int uint32_t;
typedef unsigned short uint16_t;
typedef struct
{
uint32_t CRL;
uint32_t CRH;
uint32_t IDR;
uint32_t ODR;
uint32_t BSRR;
uint32_t BRR;
uint32_t LCKR;
}GPIO_TypeDef;
typedef struct
{
uint32_t CR;
uint32_t CFGR;
uint32_t CIR;
uint32_t APB2RSTR;
uint32_t APB1RSTR;
uint32_t AHBENR;
uint32_t APB2ENR;
uint32_t APB1ENR;
uint32_t BDCR;
uint32_t CSR;
}RCC_TypeDef;
#define GPIOC ((GPIO_TypeDef*)GPIOC_BASE)
#define RCC ((RCC_TypeDef*)RCC_BASE)
#endif /* __STM32F10X_H */
文件 ‘stm32f10x_gpio.c’:
#include "stm32f10x_gpio.h"
/**
* 函数功能:设置引脚为高电平
* 参数说明:GPIOx: 该参数为 GPIO_TypeDef 类型的指针,指向 GPIO 端口的地址
* GPIO_Pin: 选择要设置的 GPIO 端口引脚,可输入宏 GPIO_Pin_0-15,
* 表示 GPIOx 端口的 0-15 号引脚。
*/
void GPIO_SetBits(GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin)
{
/* 设置 GPIOx 端口 BSRR 寄存器的第 GPIO_Pin 位,使其输出高电平 */
/* 因为 BSRR 寄存器写 0 不影响,宏 GPIO_Pin 只是对应位为 1,其它位均为 0,所以可以直接赋值 */
GPIOx->BSRR |= GPIO_Pin;
}
/**
* 函数功能:设置引脚为低电平
* 参数说明:GPIOx: 该参数为 GPIO_TypeDef 类型的指针,指向 GPIO 端口的地址
* GPIO_Pin: 选择要设置的 GPIO 端口引脚,可输入宏 GPIO_Pin_0-15,
* 表示 GPIOx 端口的 0-15 号引脚。
*/
void GPIO_ResetBits( GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin )
{
/* 设置 GPIOx 端口 BRR 寄存器的第 GPIO_Pin 位, 使其输出低电平 */
/* 因为 BRR 寄存器写 0 不影响,宏 GPIO_Pin 只是对应位为 1,其它位均为 0,所以可以直接赋值 */
GPIOx->BRR |= GPIO_Pin;
}
/**
* 函数功能:初始化引脚模式
* 参数说明:GPIOx,该参数为 GPIO_TypeDef 类型的指针,指向 GPIO 端口的地址
* GPIO_InitTypeDef:GPIO_InitTypeDef 结构体指针,指向初始化变量
*/
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/*---------------------- GPIO 模式配置 --------------------------*/
// 把输入参数GPIO_Mode的低四位暂存在currentmode
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
// bit4是1表示输出,bit4是0则是输入
// 判断bit4是1还是0,即首选判断是输入还是输出模式
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
// 输出模式则要设置输出速度
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*-------------GPIO CRL 寄存器配置 CRL寄存器控制着低8位IO- -------*/
// 配置端口低8位,即Pin0~Pin7
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
// 先备份CRL寄存器的值
tmpreg = GPIOx->CRL;
// 循环,从Pin0开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
// pos的值为1左移pinpos位
pos = ((uint32_t)0x01) << pinpos;
// 令pos与输入参数GPIO_PIN作位与运算,为下面的判断作准备
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
//若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
// pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
// 把前面处理后的暂存值写入到CRL寄存器之中
GPIOx->CRL = tmpreg;
}
/*-------------GPIO CRH 寄存器配置 CRH寄存器控制着高8位IO- -----------*/
// 配置端口高8位,即Pin8~Pin15
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
// // 先备份CRH寄存器的值
tmpreg = GPIOx->CRH;
// 循环,从Pin8开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = (((uint32_t)0x01) << (pinpos + 0x08));
// pos与输入参数GPIO_PIN作位与运算
currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos);
//若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
//pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
// 把前面处理后的暂存值写入到CRH寄存器之中
GPIOx->CRH = tmpreg;
}
}
文件 ‘stm32f10x_gpio.h’:
#ifndef __STM32F10X_GPIO_H
#define __STM32F10X_GPIO_H
#include "stm32f10x.h"
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< 选择Pin0 */ //(00000000 00000001)b
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< 选择Pin1 */ //(00000000 00000010)b
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< 选择Pin2 */ //(00000000 00000100)b
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< 选择Pin3 */ //(00000000 00001000)b
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< 选择Pin4 */ //(00000000 00010000)b
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< 选择Pin5 */ //(00000000 00100000)b
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< 选择Pin6 */ //(00000000 01000000)b
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< 选择Pin7 */ //(00000000 10000000)b
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< 选择Pin8 */ //(00000001 00000000)b
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< 选择Pin9 */ //(00000010 00000000)b
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< 选择Pin10 */ //(00000100 00000000)b
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< 选择Pin11 */ //(00001000 00000000)b
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< 选择Pin12 */ //(00010000 00000000)b
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< 选择Pin13 */ //(00100000 00000000)b
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< 选择Pin14 */ //(01000000 00000000)b
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< 选择Pin15 */ //(10000000 00000000)b
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< 选择全部引脚*/ //(11111111 11111111)b
typedef enum
{
GPIO_Speed_10MHz = 1, // 10MHZ (01)b
GPIO_Speed_2MHz, // 2MHZ (10)b
GPIO_Speed_50MHz // 50MHZ (11)b
}GPIOSpeed_TypeDef;
typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入 (0000 0000)b
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入 (0000 0100)b
GPIO_Mode_IPD = 0x28, // 下拉输入 (0010 1000)b
GPIO_Mode_IPU = 0x48, // 上拉输入 (0100 1000)b
GPIO_Mode_Out_OD = 0x14, // 开漏输出 (0001 0100)b
GPIO_Mode_Out_PP = 0x10, // 推挽输出 (0001 0000)b
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出 (0001 1100)b
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出 (0001 1000)b
}GPIOMode_TypeDef;
typedef struct
{
uint16_t GPIO_Pin;
uint16_t GPIO_Speed;
uint16_t GPIO_Mode;
}GPIO_InitTypeDef;
void GPIO_SetBits(GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin);
void GPIO_ResetBits( GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin );
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
#endif /* __STM32F10X_GPIO_H */
文件 ‘startup_stm32f10x_hd.s’:
;******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
;* File Name : startup_stm32f10x_hd.s
;* Author : MCD Application Team
;* Version : V3.5.0
;* Date : 11-March-2011
;* Description : STM32F10x High Density Devices vector table for MDK-ARM
;* toolchain.
;* This module performs:
;* - Set the initial SP
;* - Set the initial PC == Reset_Handler
;* - Set the vector table entries with the exceptions ISR address
;* - Configure the clock system and also configure the external
;* SRAM mounted on STM3210E-EVAL board to be used as data
;* memory (optional, to be enabled by user)
;* - Branches to __main in the C library (which eventually
;* calls main()).
;* After Reset the CortexM3 processor is in Thread mode,
;* priority is Privileged, and the Stack is set to Main.
;* <<< Use Configuration Wizard in Context Menu >>>
;*******************************************************************************
; THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
; WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
; AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
; INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
; CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
; INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
;*******************************************************************************
; Amount of memory (in bytes) allocated for Stack
; Tailor this value to your application needs
; <h> Stack Configuration
; <o> Stack Size (in Bytes) <0x0-0xFFFFFFFF:8>
; </h>
Stack_Size EQU 0x00000400
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size
__initial_sp
; <h> Heap Configuration
; <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF:8>
; </h>
Heap_Size EQU 0x00000200
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit
PRESERVE8
THUMB
; Vector Table Mapped to Address 0 at Reset
AREA RESET, DATA, READONLY
EXPORT __Vectors
EXPORT __Vectors_End
EXPORT __Vectors_Size
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler
; External Interrupts
DCD WWDG_IRQHandler ; Window Watchdog
DCD PVD_IRQHandler ; PVD through EXTI Line detect
DCD TAMPER_IRQHandler ; Tamper
DCD RTC_IRQHandler ; RTC
DCD FLASH_IRQHandler ; Flash
DCD RCC_IRQHandler ; RCC
DCD EXTI0_IRQHandler ; EXTI Line 0
DCD EXTI1_IRQHandler ; EXTI Line 1
DCD EXTI2_IRQHandler ; EXTI Line 2
DCD EXTI3_IRQHandler ; EXTI Line 3
DCD EXTI4_IRQHandler ; EXTI Line 4
DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1
DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2
DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3
DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4
DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5
DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6
DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7
DCD ADC1_2_IRQHandler ; ADC1 & ADC2
DCD USB_HP_CAN1_TX_IRQHandler ; USB High Priority or CAN1 TX
DCD USB_LP_CAN1_RX0_IRQHandler ; USB Low Priority or CAN1 RX0
DCD CAN1_RX1_IRQHandler ; CAN1 RX1
DCD CAN1_SCE_IRQHandler ; CAN1 SCE
DCD EXTI9_5_IRQHandler ; EXTI Line 9..5
DCD TIM1_BRK_IRQHandler ; TIM1 Break
DCD TIM1_UP_IRQHandler ; TIM1 Update
DCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation
DCD TIM1_CC_IRQHandler ; TIM1 Capture Compare
DCD TIM2_IRQHandler ; TIM2
DCD TIM3_IRQHandler ; TIM3
DCD TIM4_IRQHandler ; TIM4
DCD I2C1_EV_IRQHandler ; I2C1 Event
DCD I2C1_ER_IRQHandler ; I2C1 Error
DCD I2C2_EV_IRQHandler ; I2C2 Event
DCD I2C2_ER_IRQHandler ; I2C2 Error
DCD SPI1_IRQHandler ; SPI1
DCD SPI2_IRQHandler ; SPI2
DCD USART1_IRQHandler ; USART1
DCD USART2_IRQHandler ; USART2
DCD USART3_IRQHandler ; USART3
DCD EXTI15_10_IRQHandler ; EXTI Line 15..10
DCD RTCAlarm_IRQHandler ; RTC Alarm through EXTI Line
DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend
DCD TIM8_BRK_IRQHandler ; TIM8 Break
DCD TIM8_UP_IRQHandler ; TIM8 Update
DCD TIM8_TRG_COM_IRQHandler ; TIM8 Trigger and Commutation
DCD TIM8_CC_IRQHandler ; TIM8 Capture Compare
DCD ADC3_IRQHandler ; ADC3
DCD FSMC_IRQHandler ; FSMC
DCD SDIO_IRQHandler ; SDIO
DCD TIM5_IRQHandler ; TIM5
DCD SPI3_IRQHandler ; SPI3
DCD UART4_IRQHandler ; UART4
DCD UART5_IRQHandler ; UART5
DCD TIM6_IRQHandler ; TIM6
DCD TIM7_IRQHandler ; TIM7
DCD DMA2_Channel1_IRQHandler ; DMA2 Channel1
DCD DMA2_Channel2_IRQHandler ; DMA2 Channel2
DCD DMA2_Channel3_IRQHandler ; DMA2 Channel3
DCD DMA2_Channel4_5_IRQHandler ; DMA2 Channel4 & Channel5
__Vectors_End
__Vectors_Size EQU __Vectors_End - __Vectors
AREA |.text|, CODE, READONLY
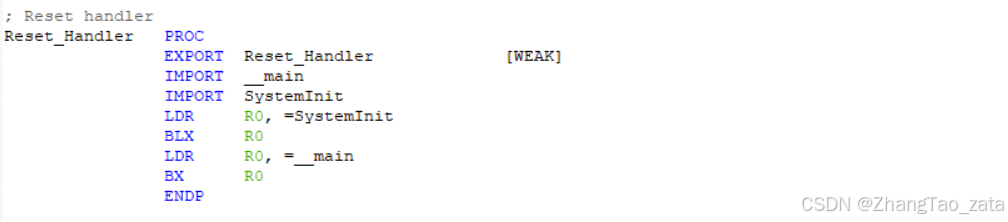
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
; Dummy Exception Handlers (infinite loops which can be modified)
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
ENDP
HardFault_Handler\
PROC
EXPORT HardFault_Handler [WEAK]
B .
ENDP
MemManage_Handler\
PROC
EXPORT MemManage_Handler [WEAK]
B .
ENDP
BusFault_Handler\
PROC
EXPORT BusFault_Handler [WEAK]
B .
ENDP
UsageFault_Handler\
PROC
EXPORT UsageFault_Handler [WEAK]
B .
ENDP
SVC_Handler PROC
EXPORT SVC_Handler [WEAK]
B .
ENDP
DebugMon_Handler\
PROC
EXPORT DebugMon_Handler [WEAK]
B .
ENDP
PendSV_Handler PROC
EXPORT PendSV_Handler [WEAK]
B .
ENDP
SysTick_Handler PROC
EXPORT SysTick_Handler [WEAK]
B .
ENDP
Default_Handler PROC
EXPORT WWDG_IRQHandler [WEAK]
EXPORT PVD_IRQHandler [WEAK]
EXPORT TAMPER_IRQHandler [WEAK]
EXPORT RTC_IRQHandler [WEAK]
EXPORT FLASH_IRQHandler [WEAK]
EXPORT RCC_IRQHandler [WEAK]
EXPORT EXTI0_IRQHandler [WEAK]
EXPORT EXTI1_IRQHandler [WEAK]
EXPORT EXTI2_IRQHandler [WEAK]
EXPORT EXTI3_IRQHandler [WEAK]
EXPORT EXTI4_IRQHandler [WEAK]
EXPORT DMA1_Channel1_IRQHandler [WEAK]
EXPORT DMA1_Channel2_IRQHandler [WEAK]
EXPORT DMA1_Channel3_IRQHandler [WEAK]
EXPORT DMA1_Channel4_IRQHandler [WEAK]
EXPORT DMA1_Channel5_IRQHandler [WEAK]
EXPORT DMA1_Channel6_IRQHandler [WEAK]
EXPORT DMA1_Channel7_IRQHandler [WEAK]
EXPORT ADC1_2_IRQHandler [WEAK]
EXPORT USB_HP_CAN1_TX_IRQHandler [WEAK]
EXPORT USB_LP_CAN1_RX0_IRQHandler [WEAK]
EXPORT CAN1_RX1_IRQHandler [WEAK]
EXPORT CAN1_SCE_IRQHandler [WEAK]
EXPORT EXTI9_5_IRQHandler [WEAK]
EXPORT TIM1_BRK_IRQHandler [WEAK]
EXPORT TIM1_UP_IRQHandler [WEAK]
EXPORT TIM1_TRG_COM_IRQHandler [WEAK]
EXPORT TIM1_CC_IRQHandler [WEAK]
EXPORT TIM2_IRQHandler [WEAK]
EXPORT TIM3_IRQHandler [WEAK]
EXPORT TIM4_IRQHandler [WEAK]
EXPORT I2C1_EV_IRQHandler [WEAK]
EXPORT I2C1_ER_IRQHandler [WEAK]
EXPORT I2C2_EV_IRQHandler [WEAK]
EXPORT I2C2_ER_IRQHandler [WEAK]
EXPORT SPI1_IRQHandler [WEAK]
EXPORT SPI2_IRQHandler [WEAK]
EXPORT USART1_IRQHandler [WEAK]
EXPORT USART2_IRQHandler [WEAK]
EXPORT USART3_IRQHandler [WEAK]
EXPORT EXTI15_10_IRQHandler [WEAK]
EXPORT RTCAlarm_IRQHandler [WEAK]
EXPORT USBWakeUp_IRQHandler [WEAK]
EXPORT TIM8_BRK_IRQHandler [WEAK]
EXPORT TIM8_UP_IRQHandler [WEAK]
EXPORT TIM8_TRG_COM_IRQHandler [WEAK]
EXPORT TIM8_CC_IRQHandler [WEAK]
EXPORT ADC3_IRQHandler [WEAK]
EXPORT FSMC_IRQHandler [WEAK]
EXPORT SDIO_IRQHandler [WEAK]
EXPORT TIM5_IRQHandler [WEAK]
EXPORT SPI3_IRQHandler [WEAK]
EXPORT UART4_IRQHandler [WEAK]
EXPORT UART5_IRQHandler [WEAK]
EXPORT TIM6_IRQHandler [WEAK]
EXPORT TIM7_IRQHandler [WEAK]
EXPORT DMA2_Channel1_IRQHandler [WEAK]
EXPORT DMA2_Channel2_IRQHandler [WEAK]
EXPORT DMA2_Channel3_IRQHandler [WEAK]
EXPORT DMA2_Channel4_5_IRQHandler [WEAK]
WWDG_IRQHandler
PVD_IRQHandler
TAMPER_IRQHandler
RTC_IRQHandler
FLASH_IRQHandler
RCC_IRQHandler
EXTI0_IRQHandler
EXTI1_IRQHandler
EXTI2_IRQHandler
EXTI3_IRQHandler
EXTI4_IRQHandler
DMA1_Channel1_IRQHandler
DMA1_Channel2_IRQHandler
DMA1_Channel3_IRQHandler
DMA1_Channel4_IRQHandler
DMA1_Channel5_IRQHandler
DMA1_Channel6_IRQHandler
DMA1_Channel7_IRQHandler
ADC1_2_IRQHandler
USB_HP_CAN1_TX_IRQHandler
USB_LP_CAN1_RX0_IRQHandler
CAN1_RX1_IRQHandler
CAN1_SCE_IRQHandler
EXTI9_5_IRQHandler
TIM1_BRK_IRQHandler
TIM1_UP_IRQHandler
TIM1_TRG_COM_IRQHandler
TIM1_CC_IRQHandler
TIM2_IRQHandler
TIM3_IRQHandler
TIM4_IRQHandler
I2C1_EV_IRQHandler
I2C1_ER_IRQHandler
I2C2_EV_IRQHandler
I2C2_ER_IRQHandler
SPI1_IRQHandler
SPI2_IRQHandler
USART1_IRQHandler
USART2_IRQHandler
USART3_IRQHandler
EXTI15_10_IRQHandler
RTCAlarm_IRQHandler
USBWakeUp_IRQHandler
TIM8_BRK_IRQHandler
TIM8_UP_IRQHandler
TIM8_TRG_COM_IRQHandler
TIM8_CC_IRQHandler
ADC3_IRQHandler
FSMC_IRQHandler
SDIO_IRQHandler
TIM5_IRQHandler
SPI3_IRQHandler
UART4_IRQHandler
UART5_IRQHandler
TIM6_IRQHandler
TIM7_IRQHandler
DMA2_Channel1_IRQHandler
DMA2_Channel2_IRQHandler
DMA2_Channel3_IRQHandler
DMA2_Channel4_5_IRQHandler
B .
ENDP
ALIGN
;*******************************************************************************
; User Stack and Heap initialization
;*******************************************************************************
IF :DEF:__MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
END
;******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE*****
1. 代码解释
- main.c - 主程序文件 这是一个简单的LED闪烁程序: 配置GPIOC的Pin2作为LED控制引脚 在主循环中通过GPIO_SetBits和GPIO_ResetBits来控制LED的亮灭 使用Delay函数实现延时
- startup_stm32f10x_hd.s - 启动文件 这是STM32的汇编启动文件,主要功能包括: 设置堆栈指针 配置中断向量表 初始化系统时钟 跳转到C语言main函数
- stm32f10x.h - 寄存器定义文件 定义了STM32的硬件寄存器映射: 定义了外设基地址(PERIPH_BASE等) 定义了GPIO和RCC等外设的寄存器结构体 提供了访问这些寄存器的指针定义
- stm32f10x_gpio.c/.h - GPIO驱动文件 提供GPIO操作的函数实现: GPIO_Init:初始化GPIO引脚的模式和速度 GPIO_SetBits:设置引脚高电平 GPIO_ResetBits:设置引脚低电平 关键的GPIO模式定义: typedef enum { GPIO_Mode_AIN = 0x0, // 模拟输入 GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入 GPIO_Mode_IPD = 0x28, // 下拉输入 GPIO_Mode_IPU = 0x48, // 上拉输入 GPIO_Mode_Out_OD = 0x14, // 开漏输出 GPIO_Mode_Out_PP = 0x10, // 推挽输出 GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出 GPIO_Mode_AF_PP = 0x18 // 复用推挽输出 }GPIOMode_TypeDef; 这是一个典型的STM32F10x系列单片机的基础程序,实现了最基本的GPIO控制功能,可以控制LED的亮灭。程序的结构清晰,包含了完整的底层驱动实现。
10 初识stm32固件库
如何下载固件库

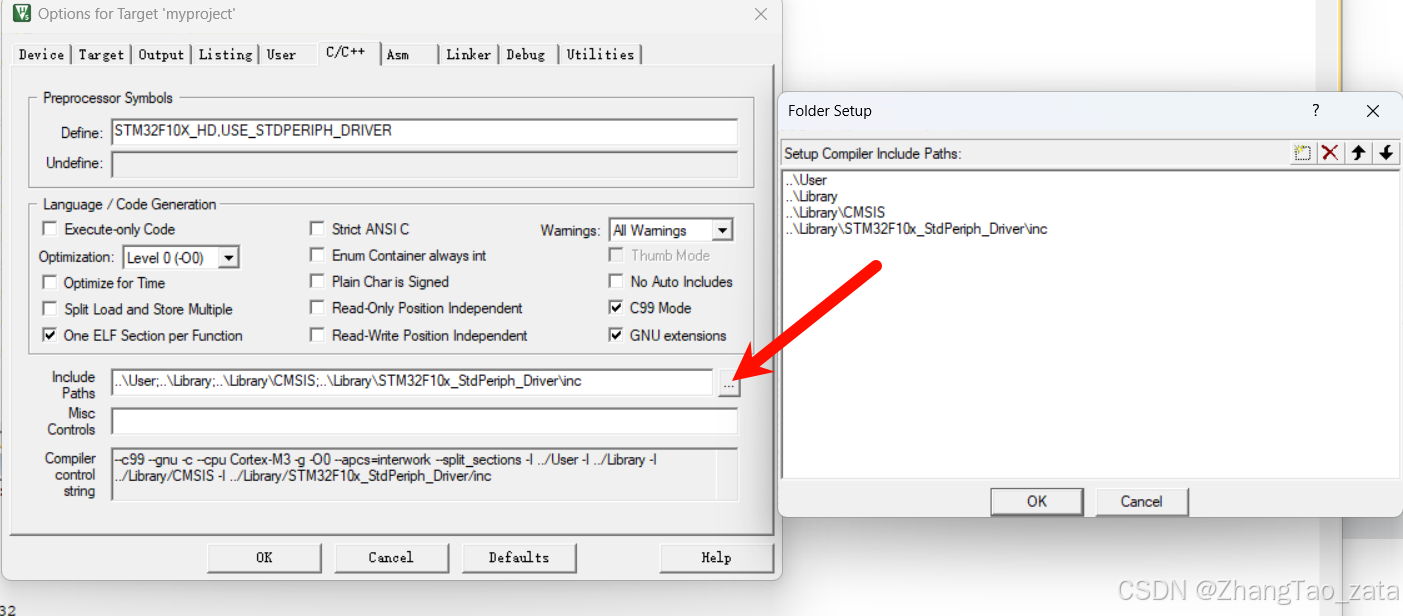
11 新建项目,固件库版本(开始使用固件库编程)
一般结构如下
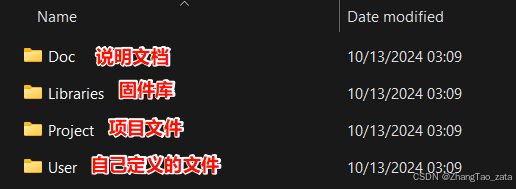
可以在这里改名
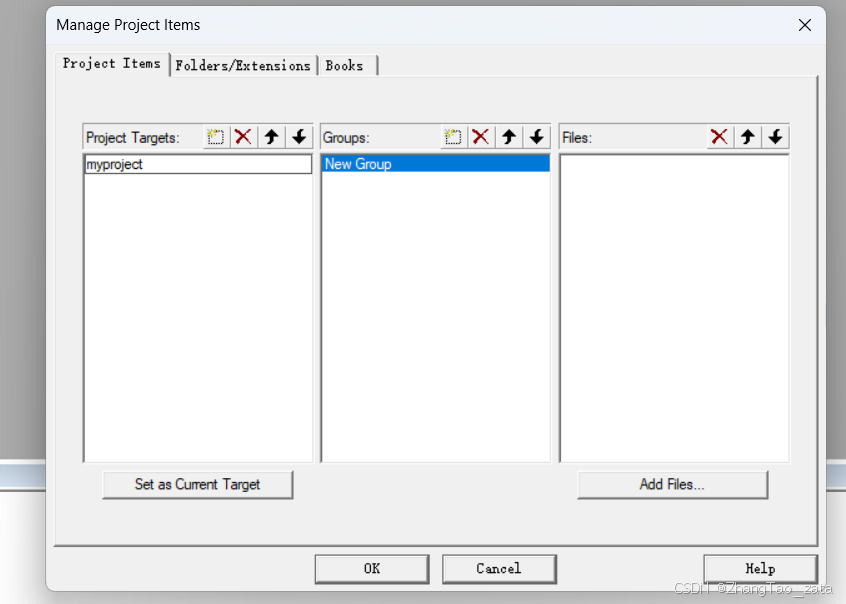
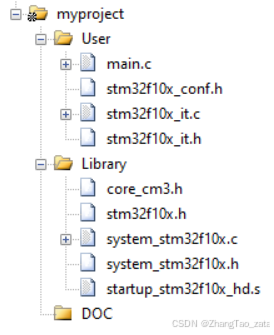
创建好文件夹还不行,还需要在keil中指定文件目录