第九章 解码与部署
以下是第九章“解码与部署”的内容总结,涵盖了解码策略、解码加速算法及低资源部署策略的核心要点:
9.1 解码策略
大语言模型通过自回归生成文本,解码策略决定输出质量与多样性。
9.1.1 背景
- 自回归解码流程:模型基于上下文逐词生成概率分布,选择下一词元,迭代至结束。
- 基本策略:
- 贪心搜索:每步选概率最高词元,适合翻译/摘要,但开放任务易生成重复、不自然文本。
- 概率采样:按概率分布采样,增加多样性,但可能引入无关词元。
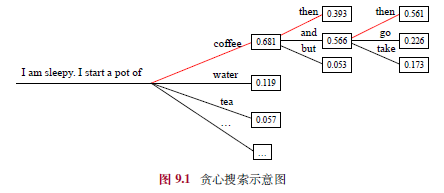
9.1.2 贪心搜索改进
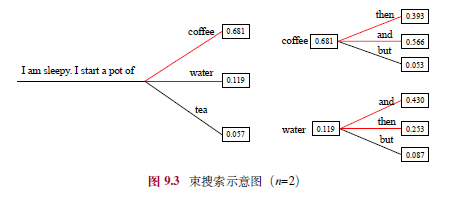
- 束搜索:保留Top-k候选句子(束大小3-6),选整体概率最高者,避免局部最优。
- 长度惩罚:归一化概率(惩罚因子0.6-0.7),鼓励长句生成。
- 重复惩罚:如n-gram惩罚(3-5)、出现/频率惩罚(0.1-1),减少重复。
9.1.3 随机采样改进
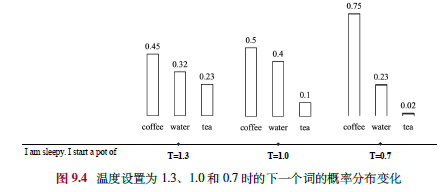
- 温度采样:调整softmax温度(<1集中分布,>1均匀化),控制随机性。
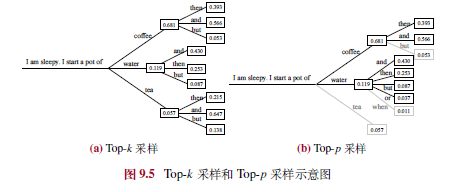
- Top-k采样:从Top-k词元采样,减少低概率词影响。
- Top-p采样:从累积概率≥p的词元集采样,适应上下文变化。
- 对比解码:利用大/小模型概率差值,提升重要词元影响力。
9.1.4 实际设置
- T5:贪心/束搜索(束大小4,惩罚0.6)。
- GPT-3:束搜索(4,0.6)。
- Alpaca:Top-k(50)、Top-p(0.9)、温度0.7。
- LLaMA:任务相关(如贪心、温度0.1/0.8)。
- OpenAI API:支持多种策略及惩罚参数。
9.2 解码加速算法
自回归解码效率低,需优化全量解码(初始计算)和增量解码(逐词生成)阶段。
9.2.1 解码效率分析
- 阶段:
- 全量解码:一次性计算输入状态,缓存键值。
- 增量解码:仅计算新词元状态,更新缓存。
- 效率指标:GPU算力(FLOP/s)、带宽(byte/s)、计算强度(FLOP/byte)。
- 瓶颈:
- 全量解码:计算瓶颈(算力限制)。
- 增量解码:带宽瓶颈(内存墙)。
9.2.2 系统级优化
- FlashAttention:分块融合注意力计算,减少访存量,提速10倍。
- PagedAttention:分页管理键值缓存,优化拼接与注意力并行。
- 批次管理:
- vLLM连续批处理:动态拆分请求,增大批次。
- DeepSpeed-MII动态分割:融合全量/增量解码,提升吞吐。
9.2.3 解码策略优化
- 推测解码:小模型预测、大模型验证,加速2倍。
- 级联解码:按请求难度分配模型,分类器判断结果。
- 非自回归解码:并行生成(如Medusa),需验证质量。
- 早退机制:熵阈值或混合深度跳层计算,提效。
9.2.4 代码实践
- 常见库:llama.cpp(跨平台量化)、vLLM(高效解码)、DeepSpeed-MII(动态分割)、FlexFlow(推测优化)。
- vLLM示例:加载LLaMA-2-7b,支持贪心搜索、网络服务。
9.3 低资源部署策略
模型压缩减少显存占用,适应资源受限环境。
9.3.1 量化基础
- 量化:浮点数映射为整数(如INT8),缩放因子S、零点Z控制范围。
- 类型:
- 均匀/非均匀:间隔是否固定。
- 对称/非对称:零点是否为0。
- 粒度:张量、通道、组,精度与开销权衡。
- 示例:非对称/对称量化8-bit,误差分析。
9.3.2 训练后量化
- 权重量化:
- GPTQ:逐层分组量化,3-4bit有效。
- AWQ:激活感知缩放,关注关键权重。
- 权重+激活量化:
- 细粒度:异常值用FP16,正常值INT8。
- SmoothQuant:平衡量化难度,转移至权重。
- 其他:
- QLoRA:4-bit量化+16-bit适配器微调。
- 量化感知训练:蒸馏压缩权重/激活/缓存。
9.3.3 经验分析
- 结论:
- INT8权重影响小,4-bit需优化策略。
- 激活值难量化,需混合精度。
- 轻量化微调(如QLoRA)补偿损失。
- 实验:LLaMA 4/8-bit量化性能接近16-bit,显存降至3.94-7.34GB。
9.4 其他压缩方法
- 模型蒸馏:
- 传统:反馈(logits)、特征(中间层)。
- 大模型:白盒(MINILLM)、黑盒(思维链蒸馏)。
- 模型剪枝:
- 传统:结构化(删组件)、非结构化(掩码0)。
- 大模型:Sheared LLaMA动态剪枝至2.7B,恢复87.8%精度。
总结
本章探讨了大语言模型的解码与部署技术。解码策略平衡质量与多样性,加速算法优化效率,低资源策略通过量化、蒸馏、剪枝减少资源需求。未来需进一步提升效率与真实场景适配性。
第十章 提示学习
以下是第十章“提示学习”的内容总结,涵盖基础提示、上下文学习和思维链提示的核心要点:
10.1 基础提示
提示学习通过自然语言接口与大语言模型交互,是解决下游任务的主要方法。提示质量直接影响模型表现,设计方法分为人工设计和自动优化。
10.1.1 人工提示设计
- 关键要素:
- 任务描述:清晰具体,如“回答问题”或“补全代码”,可用符号(如###)强调格式。
- 输入数据:自然语言或线性化结构化数据(如表格、图)。
- 上下文信息:提供参考文档或示例,提升复杂任务能力。
- 提示策略:如“逐步思考”前缀或专家角色,提升推理或领域表现。
- 设计原则:
- 清晰表达目标:明确任务、格式和限制(如“50字摘要”)。
- 分解子任务:将复杂任务拆分为有序子步骤。
- 少样本示例:提供输入-输出对,增强语义映射。
- 模型友好格式:用特殊符号分隔,优先英语指令。
10.1.2 自动提示优化
- 离散提示优化(自然语言词元):
- 梯度方法:用梯度搜索最佳词元,或优化“软词元”嵌入。
- 强化学习:将提示生成视为策略网络,基于奖励优化。
- 编辑方法:迭代修改提示,适配API调用场景。
- 大模型方法:用大模型生成提示,蒙特卡洛搜索筛选。
- 连续提示优化(嵌入向量):
- 监督学习:微调前缀/输入层提示向量,节省参数。
- 迁移学习:共享源任务提示,或加权组合适配目标实例。
- 局限性:大模型参数量大,传统优化方法适用性有限。
10.2 上下文学习 (In-context Learning, ICL)
上下文学习通过任务描述和示例提示大模型,无需微调即可处理新任务。
10.2.1 形式化定义
- 形式:提示 = 任务描述 + 示例(可选) + 测试输入,模型生成输出。
- 与指令微调区别:ICL仅靠提示调用,微调提升零样本能力。
10.2.2 示例设计
- 示例选择:
- 相关度排序:用k-NN检索相似示例。
- 集合多样性:MMR/DPP算法平衡相关性和多样性。
- 大模型评分:评估示例增益,或训练分类器筛选。
- 示例格式:
- 人工标注:输入-输出对,或加任务描述/思维链。
- 自动生成:用大模型基于种子示例扩展模板。
- 示例顺序:
- 候选顺序:语义相似度排序,靠近测试样本优先。
- 质量评估:用任务表现或预测熵值筛选。
10.2.3 底层机制
- 预训练阶段:
- 任务设计:元训练(如MetaICL)增强示例学习能力。
- 数据选择:多样性及长程依赖提升ICL,长尾词汇关键。
- 推理阶段:
- 任务识别:利用预训练知识识别任务。
- 任务学习:隐式梯度下降或复杂算法学习新任务。
- 规模效应:小模型偏任务识别,大模型强于任务学习。
10.3 思维链提示 (Chain-of-Thought, CoT)
思维链通过中间推理步骤增强复杂推理任务表现。
10.3.1 基本形式
- 结构:⟨输入,思维链,输出⟩,提供逻辑推理过程。
- 简单方法:如“Let’s think step by step”诱导推理。
10.3.2 优化策略
- 示例设计:
- 复杂化:增加推理步骤或问题长度。
- 多样化:聚类选择多样示例,减弱错误影响。
- 生成方法:
- 采样法:Self-consistency生成多路径,投票集成。
- 验证法:DIVERSE用验证器检查推理路径/步骤。
- 拓展结构:
- 思维树 (ToT):树形搜索,支持前瞻和回溯。
- 思维图 (GoT):图结构,节点汇聚复杂推理。
10.3.3 进一步讨论
- 能力来源:
- 训练数据:局部变量重叠支持推理。
- 函数学习:分解为信息聚焦和单步组合。
- 模型影响:
- 符号与模式:表达任务意图为主。
- 推理生成:含推理路径的序列更准确。
总结
提示学习是高效利用大模型的关键。基础提示依赖人工设计或自动优化,上下文学习通过示例实现无微调任务适应,思维链提示增强复杂推理。未来需优化示例设计、推理结构及模型稳定性。
第十一章 规划与智能体
11.1 基于大语言模型的规划
规划是大语言模型解决复杂问题和自主智能体的核心能力,通过分解任务并制定动作序列来简化问题求解。
11.1.1 整体框架
- 核心组件:
- 任务规划器(Task Planner):由大语言模型担任,生成解决方案(动作序列),可引入存储机制管理长期任务。
- 规划执行器(Plan Executor):执行动作,可由大语言模型或物理实体(如机器人)实现。
- 环境(Environment):动作执行的场景(如Web、虚拟世界)。
- 工作流程:任务规划器生成方案,执行器在环境中执行,环境提供反馈,规划器根据反馈优化方案,迭代进行。
11.1.2 方案生成
- 形式:自然语言(直观但不严谨)或代码(规范、可执行)。
- 方法:
- 一次性方案生成:生成完整动作序列,简单但容错性低,适合逻辑性强的任务(代码表达)或非形式化任务(自然语言)。
- 迭代式方案生成:逐步生成下一步动作,结合环境反馈调整。
- ReAct方法:模拟“思考-决策”,生成决策理由和动作,迭代推进。
- 回溯策略:如思维树,通过回退优化方案,避免次优结果。
11.1.3 反馈获取
- 外部反馈:
- 物理工具:如代码解释器,提供执行结果。
- 人类:在具身智能中提供实时环境信息。
- 虚拟环境:如游戏,提供动作反馈。
- 内部反馈:
- 大语言模型自我判断动作正确性。
- Reflexion方法:将简单反馈转为详细反思,优化方案。
11.2 基于大语言模型的智能体
智能体是具备感知、决策、执行能力的自主系统,大语言模型提升其在开放动态环境中的表现。
11.2.1 智能体概述
- 发展历程:
- 规则智能体:依赖预定义规则,适应性低。
- 模型智能体:如强化学习,通过试错学习策略。
- 大语言模型智能体:利用语言理解和规划能力,处理复杂任务。
11.2.2 大语言模型智能体的构建
- 核心组件:
- 记忆组件:
- 短期记忆:上下文窗口,临时存储近期信息。
- 长期记忆:持久存储知识、经验,外部存储实现。
- 规划组件:分解任务,生成并优化动作方案。
- 执行组件:执行规划,与环境交互,可借助外部工具。
- 记忆组件:
- 工作流程:感知环境→检索记忆→规划策略→执行动作→获取反馈→更新记忆,动态调整行为。
- 示例:RecAgent推荐系统智能体,用户Bob通过记忆、规划、执行完成观影及社交行为。
11.2.3 多智能体系统的构建
- 构建方法:定义目标→创建多智能体(不同角色)→设计交互机制→考虑可扩展性等。
- 通讯协同机制:
- 通讯机制:协议(交换规则)、拓扑(连接关系)、内容(传输信息)。
- 协同机制:协作(共享资源)、竞争(博弈优化)、协商(冲突解决)。
11.2.4 典型应用
- WebGPT:单智能体,增强信息检索,提供准确回答。
- MetaGPT:多智能体,模拟软件开发团队,高效协作但代码成功率待提升。
- 西部世界沙盒模拟:生成式智能体,社会仿真,支持复杂交互。
11.2.5 待解决的关键技术问题
- 资源消耗:模型调用成本高,多智能体系统难以扩展。
- 工具使用:适配性不足,可扩展性需加强。
- 多智能体交互:通信协调复杂,需高效机制。
- 模型适配:指令理解、长期记忆、行为一致性待优化。
- 真实世界应用:硬件限制、信息超载、安全性要求高。
总结
本章介绍了基于大语言模型的规划框架(方案生成与反馈获取)及智能体系统(单智能体与多智能体)的构建与应用。规划通过任务分解和反馈优化解决复杂问题,智能体则整合记忆、规划、执行能力适应动态环境。未来需解决资源效率、工具适配、交互机制及真实世界应用的挑战,以推动智能体技术发展。